

EDUCATION NEWS
Small Autonomous Robots Designed for EE Undergraduate Training
In recent years, an inter-university open robot competition, known as Robocon, has attracted considerable attention among engineering students in Asia. This annual robot contest is organized by the Asian-Pacific Broadcasting Union (ABU) for university, college and polytechnic undergraduate students in the Asia-Pacific region. Under a common set of rules, participants create competition robots using their creative and technological abilities in this open competition. Each national sub-event of Robocon is broadcast in each home country by an ABU member, and the final event will be held in turns by participating countries. Designs of the robots are quite open. However, agility in maneuvering within a large area of floor grid has always been a theme challenge. Challenges presented by the Robocon games are not trivial at all. For example, Robocon 2009 calls for tight cooperation of two robots to carry a third one.
The course is offered to 100+ of our own second year undergraduate students well aligned in background. This population justifies us to design our own project platform each year. With different platform and goals each year, a new class will be faced with fresh challenges. In the process of designing and implementing new robots, many non-trivial issues needed to be addressed. In the remaining of this article, I shall highlight on the development of the courseware, how various issues were addressed, as well as some encouraging observation and outcome.
Platform to be Used
To foster innovation, open-ended projects will provide more freedom to the students. Unfortunately, year-two students have learnt only the basics of electronics, basic programming and computers. Originality and merits of open design projects can also be difficult to assess or rank. On the contrary, developmental or enhancement tasks based on a common platform can be assessed more fairly. Our decision was to let the students work on a common platform that would provide room for students to experiment, explore, and innovate.
The next question was what type of platform is to be employed. An autonomous robot seemed to fit our requirements, and would extend the project’s coverage to some mechanical challenges. A robotic platform would also provide more fun to the students. Ultimately, the fundamental requirements of the platform became clear:
-
•It should come as an unassembled kit of components, providing an opportunity for EE students to enhance their construction skills.
-
•It is controlled by a microcontroller widely used in tertiary education and the industry.
-
•It is readily expandable, especially for adding extra sensors and actuators.
-
•It can be modified to move around quickly and make small positional adjustments accurately.
From an educational point of view, we also asked ourselves the following questions
-
•Is the focus of the competition appropriate for the team’s intellectual level and goals?
-
•Is the course(teaching) matched to the competition?
-
•How can we ensure hardware is available and reliable for the class to proceed smoothly?
As we needed around fifty sets of kits each year, for budget reasons we were in favor of designing our own robot platform yearly. The robot platforms we designed possesses the following additional features that can provide EE students with sufficient room for exploration.
-
•It supports programming in C, or a high-level language that allows direct hardware accesses.
-
•It is inherently agile in motion and maneuvering.
-
•It supports accurate tracking of its bearing and location.
-
•It has good floor sensing abilities for maneuvering in a grid at speed.
-
•It provides sufficient channels to actuate two motors and a few standard servos.
-
•It is cable of measuring voltage, pulse-width and frequency of signals.
-
•It has built-in multitasking core for periodic sampling and accurate pulse-width generation.
-
•It has built-in debugging/tuning aids for software.
-
•It is accompanied by assembly diagrams, technical anatomy, source code and schematics.
-
•It is accompanied by a library of basic software functions for built-in sensors and actuators.
-
•It is accompanied by a complete toolkit for construction, tuning and MCU re-programming.
-
•It has built-in functional tests for quick isolation of fault upon hardware failures.
-
•It provides good freedom in extending capabilities and improving performance.
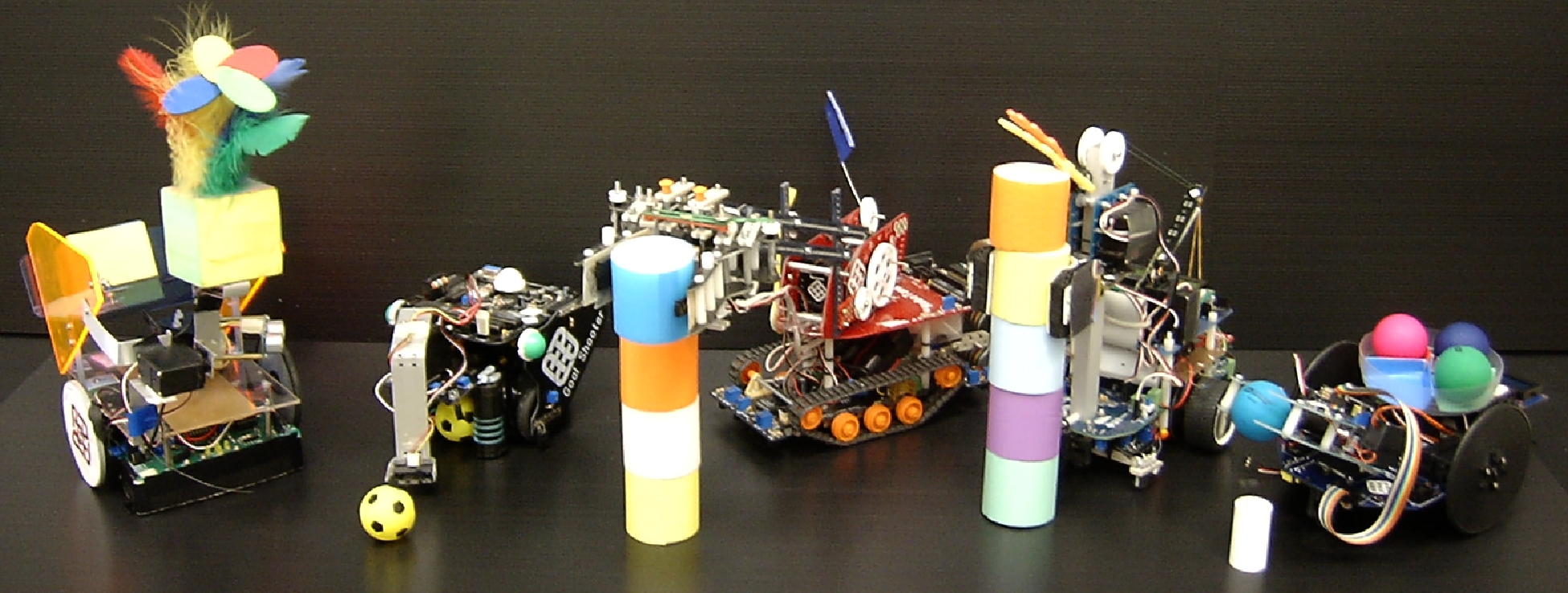
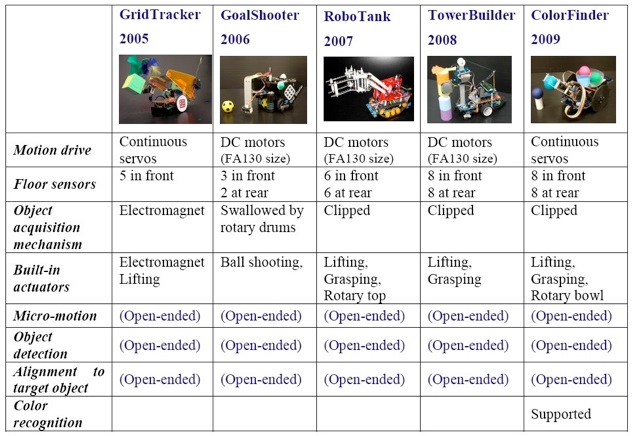
In the table below, key features and capabilities of each of our designs are listed.
Below are some video clips of our robots in action:
GridTracker 2005 Click to download demonstration video
GoalShooter 2006 Click to download demonstration video
RoboTank 2007 Click to download demonstration video
TowerBuilder 2008 Click to download demonstration video
The rules for our in-house competition were carefully designed to favor good engineering minds instead of power or luck. Without looking at the full details, tasks to be performed in most of these competitions are:
-
•Move fast while tracking lines in a floor grid.
-
•Accurately adjust its bearing upon turning.
-
•Accurately adjust its distance from an object.
-
•Lift object to correct heights.
-
•Vertically aligning a stack of objects.
-
•Keep track of its own bearing and absolute position in the grid.
-
•Remember junctions visited.
-
•Detect, as well as differentiate, obstacles, target objects or opponents.
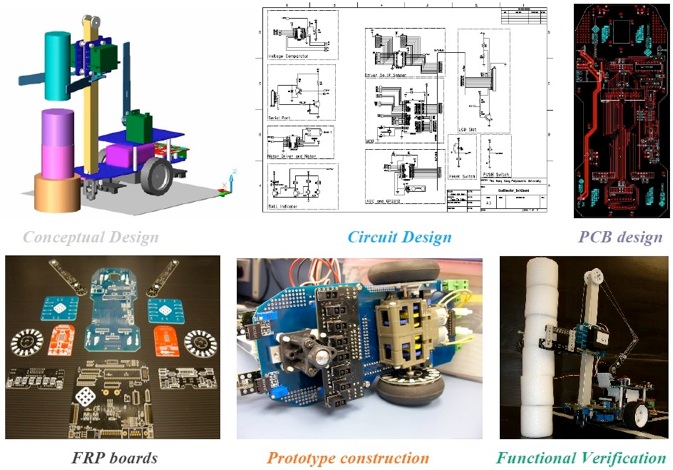
Pilot Developmental Work
Much ahead of time, design of the experimental platform needed to start. Within budget, space and equipment constraints, the design needed to possess a good number of attributes including the scope of knowledge integration, flexibility for explorations, feasibility for fair assessment, entertaining to watch and, most important of all, enjoyable to work with. To validate a new design, an initial prototype was built for technical evaluation.
Planning the Activities and Assessment
Based on all the aforementioned considerations, the class activities were planned as follows:
Lectures: Necessary concepts, old or new, would be covered in lectures. These lectures are quite different from the usual single-threaded presentations, as substantial cross-referencing among documents would be performed.
Laboratory work:Starting early in the semester, the students assembled their robots. Progress demonstrations were spread out evenly with three to four weeks in between.

Written tests: A mid-semester test would be conducted to assess the students’ understanding of all underlying concepts, and a final one given to assess their in-depth understanding of the platform.
Project reports: Collected and graded at the end of the semester, reports are used to assess documentation skills, quality of the work and the contributions of members.
The final demonstration would be an ultimate challenge, in which students were given full freedom in modifying or extending the hardware, software or mechanics of the robot to perform a task that was deemed impossible with the original functionalities of the platform.

Personal Development of Students
In addition to enhancing discipline knowledge and competence, students also reflected that the nature of the course also have positive effects on their personality attributes. Our students worked together in small teams to capture the merits of teamwork. In the IP laboratory, breaking previous speed records or being the first to demonstrate an innovative idea, would always gain applause and good respect from peers.
An annual robotic project competition was organized after the semester two examinations for the teams that performed the best in IP. Apart from being entertaining to watch, robots in the event also exhibited accuracy, speed and strategic decisions easily appreciated by most of the audience.
Click here to download video clip for the 2008 contest
Perceivable Outcomes

After going through our own competition, our students formed teams to compete in RoboconHK regional contest, in 2006, 2007 and 2008. For the university, our teams won both the First-runner-up and Second-runner-up prizes in 2006, then the Best Artistic Design Award in 2007. In 2008, competing against nine other teams, our EIE team took three Awards.
Click here to see the 2008 Robocon Hong Kong contest.
In the report written by the students, apart from discipline knowledge and practical skills, we could see all kinds of positive effects on their personal values and aptitudes gained in struggling through the project.
Conclusions

Acknowledgements
For all the benefits me and my students gained, I am indebted to the full support from the Department and partial funding from the Faculty, without which the success of this special course would not be possibly sustained.
References
[1] T. Balch, et al., “Designing personal robots for education: hardware, software, and curriculum”, Pervasive Computing, April-June 2008, pp. 5-9.
http://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=4487080&isnumber=4487076
[2] R. R. Murphy, “Competing for a Robotics Education”, IEEE Robotics & Automation Magazine, Volume 8, Issue 2, pp. 44-55, June 2001.
http://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=932757&isnumber=20189
[3] J. Grimes and J. Seng, “Robotics competition: Providing structure, flexibility, and an extensive learning experience,” ASEE/IEEE Frontiers in Education Conference, Oct. 2008, pp. F4C-9–F4C-13.
http://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=4720494&isnumber=4720249
[4] D.J. Pack, R. Avanzato, D.J. Ahlgren, and I.M. Verner, “Fire-fighting mobile robotics and interdisciplinary design-comparative perspectives”, IEEE Transactions on Education, Volume 47, Issue 3, pp 369- 376, Aug. 2004.
http://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=1323151
Jimmy To, Hong Kong Polytechnic University, Hong Kong (Email: enjimmy@inet.polyu.edu.hk) received his BSc(Hons) degree in Electrical Engineering from the University of Manitoba and MSc degree in Computer Engineering from the University of Southern California in 1988. He subsequently received his PhD in Computer Science from the Hong Kong University of Science and Technology in 1997. Prior to joining the Hong Kong Polytechnic University, he accumulated fives years of industrial experience in the development of consumer and computer products. He served the Hong Kong Chapter of ACM as the chapter's Chairman. His publications include a research monograph Interactive VoD systems (Kluwer). His current interests are in embedded systems, control and robotics.
